CANNET Systembeschreibung
Übersicht
Das CANNET Home Network
besteht aus bis zu 255 Nodes die über einen seriellen Bus verbunden sind.
Das Netzwerk ermöglicht die Übertragung von Schaltzuständen von
den digitalen Eingängen der Nodes zu den digitalen Ausgängen der verbundenen Nodes. Diese Eingangssignale werden als
gesichertes Protokoll über den CANNET-Bus übertragen und können durch die freie
Zuweisung der Ausgänge an den anderen Nodes am verteilten Netzwerk
ausgegeben werden. Das Verhalten der Ausgänge ist ebenfalls programmierbar und
kann den Bedürfnissen angepasst werden. Diese Kopplung von Ausgängen und
Eingängen beispielsweise für die Übertragung von Alarmsignalen, läuft im System
vollkommen autark. Es besteht darüber hinaus die Möglichkeit Ausgänge auch per
Software von einem Host-Prozessor direkt zu steuern.
Zusätzlich zu den Schaltsignalen liefern die
einzelnen Nodes aber auch Umgebungsinformationen wie die Betriebsspannung an den
einzelnen Nodes bzw. die Temperatur in diesen Nodes. Diese Informationen werden
zyklisch alle 10 Sekunden übertragen und erlauben eine Auswertung, eine
Überwachung bzw. Visualisierung durch einen Host-Prozessor. Eine Erweiterung zur
Messung von Luftfeuchte bzw. Luftdruck ist im System angedacht aber aktuell
nicht verfügbar. Schließlich gibt es noch die Möglichkeit der Übertragung von
frei definierbaren Daten zwischen zwei Host-Computern oder von einem Host zu
einer Anzeige-Einheit.
Die Nodes werden über die Netzwerkleitung mit
Spannung versorgt und benötigen pro Node nur ca. 25mA bei 12V, daher kann das
Netzwerk mit überschaubaren Aufwand über eine Notstromversorgung auch bei
Netzausfall betrieben werden. Diese Ausfallsicherheit und die Stör- bzw.
Sabotagesicherheit sind die wesentlichen Merkmale des CANNET Systems.
Der Netzwerk Aufbau
Der Anschluß der Nodes an den Bus erfolgt über vierpolige Flachkabel mit “Modular” Steckverbindern.
Die beiden mittleren Kontakte des Steckers führen das differenzielle Bus Signal und
über die beiden äusseren Kontakte wird Masse und eine nominale +12 Volt Versorgungsspannung zugeführt. Die +12 V Leitung
ist in der Node mit einer flinken Feinsicherung von 0,25 A abgesichert. Die Nodes benötigen daher keine zusätzliche lokale
Versorgung solange die Leitungslänge der Zuführung eine Spannung von grösser + 8 Volt an der einzelnen Node gewährleistet.
Bei weit entfernten Nodes kann über den zusätzlichen Versorgungsspannungsstecker eine 12 Volt Versorgung
sichergestellt werden. Die beiden Versorgungsspannungen sind über Dioden entkoppelt und können aus diesem
Grund auch beide gleichzeitig angeschlossen werden.

|
Neben der CANNET-Verbindung stellt jede Node eine RS232-Verbindung zur Verfügung die sowohl als
Konfigurations-Schnittstelle als auch als Host-Interface verwendet wird.
Die einzelnen Nodes sind identisch aufgebaut und besitzen jeweils 4 digitale Eingänge (DIN) und 4
“Open-Collector” Ausgänge (DOUT). Alle Nodes senden bei einer Änderung eines oder mehrerer, der lokalen
digitalen Eingänge eine CANNET-Message die von jeder teilnehmenden Node empfangen werden kann.
Die Konfiguration welcher Eingang einer entfernten Node (remote Node) einen beliebigen Ausgang der
empfangenden Node (local Node) schaltet, kann für jede Node separat und mit freier Zuordnung über deren UART Schnittstelle
programmiert werden.
|
Neben der Signalübertragung werden über das CANNET Netzwerk auch Informationen bezüglich der jeweiligen
lokalen Versorgungsspannung (Vsupp), der 2,5 Volt Referenzspannung jeder Node sowie der Temperatur in den einzelnen
System übertragen. Dies erfolgt zyklisch ca. alle 10 Sekunden in einem speziellen “Basis”-Protokoll.
Alle empfangenden Nodes können diese Information über die UART-Schnittstelle ausgeben . Ein über die UART
verbundener Host kann diese Information entsprechend empfangen, überwachen und visualisieren.
Die dritte Basisfunktion des CANNET Systems besteht in der transparenten Übertragung von bis zu 32
ASCII Zeichen von der UART einer beliebigen Node zur einer beliebigen anderen Node. Diese Informationen werden nicht an jeder Node
ausgegeben sondern explizit an den in der Nachricht addressierten Empfänger gesendet.
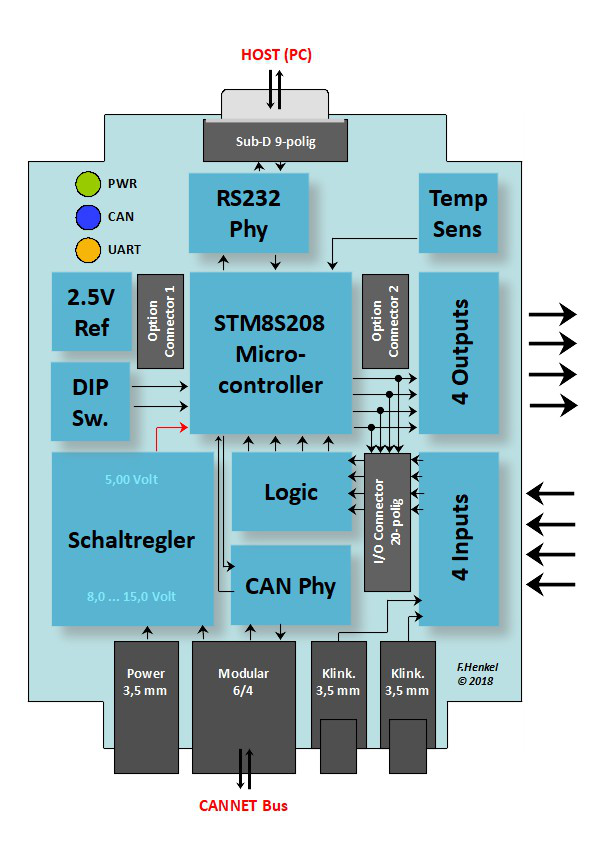
Die CANNET Node
Die CANNET Nodes sind auf einer 139mm x 69mm großen, doppelseitigen Leiterplatte aufgebaut die in ein entsprechendes Kunststoffgehäuse verbaut wird. Anschlüsse für den CANNET Bus, eine optional externe Spannungsversorgung über ein Steckernetzteil sowie für zwei
Eingangssignalquellen sind auf der Leiterplatte standardmäßig vorhanden.
Die UART Schnittstelle wird wahlweise mit einem gewinkelten Sub-D Steckverbinder für sogenannte CANNET “Master”
,Systeme mit einer permanenten UART Verbindung mit
einem HOST-Anschluß bzw. mit einem nicht gewinkelten Sub-D Steckverbinder der bei geschlossenem Gehäuse von aussen nicht zugänglich ist
(nur zur Konfiguration benötigt) ,
bestückt.
Die weiteren Ein- bzw. die Ausgänge sind intern über einen 20-poligen Wannenstecker (I/O Connector) kontaktierbar.
CANNET Node Blockdiagramm
CANNET Eingänge
Die DIN Eingänge der CANNET Nodes sind “active low” Eingänge und können durch Open-Collector, Open-Drain oder
mechanische Schalter gegen Masse geschaltet werden. Interne Pull-Up Widerstände erzeugen ohne Ansteuerung der Eingänge einen logischen “
High” Pegel von +5 Volt.
Externe Push-Pull-Ausgänge können bis zu einer Spannung von +24 Volt benutzt werden. Die Eingänge werden durch eine
Diode und einen Längswiderstand bis maximal 40 Volt geschützt.
Jeder Eingang besitzt ein passives Filter das höherfrequente Störungen über 50 Hz reduziert.
Alle Eingänge verfügen über invertierende Schmitt-Trigger die auch Signale mit langsamen Anstiegs- bzw. Abfall-Flanken
verarbeiten können.
Die Eingänge DIN1 und DIN2 ermöglichen
darüber hinaus die Polarität der Eingangssignale über Jumper anzupassen. Diese beiden Eingänge sind extern auch über die beiden
3,5mm Klinkenbuchsen aktivierbar, die beide 3-polig ausgeführt sind und für externe, aktive Sensoren eine + 5.0 Volt Versorgung bereitstellen.
CANNET Ausgänge
Die CANNET Ausgänge sind nur über den 20-poligen “I/O Connector” auf dem Board kontaktierbar. Für den
Anschluß der Ausgänge in einem System sind wahlweise interne bzw. externe Adapterboards vorgesehen.
Die Ausgänge sind “Open-Collector” Ausgänge mit einem nominalen Ausgangsstrom von 50 mA und einer Spannungsfestigkeit
von maximal 30 Volt. Dies genügt zur Ansteuerung von kleinen Relais bzw. von Opto-Kopplern.
CANNET Schaltregler
Der auf dem CANNET-Board verwendete Schaltregler basiert auf dem IC MC34063 und liefert eine Ausgangsspannung von 5,0 Volt. Die
Ausgangsspannung wird mit einem Mehrgang-Trimmpotentiometer auf exakt 5,00 Volt eingestellt um die Referenz für den A/D-Wandler im Microcontroller
bestmöglich zu kalibrieren.
Eine Strombegrenzung des Schaltreglers limitiert die Stromaufnahme in einem eventuellen Fehlerfall auf typisch 300 mA. Dieses Feature
betrifft auch den separaten Spannungseingang über den Power Stecker der Node der intern nicht abgesichert ist.
Der Versorgungsspannungsbereich des Gerätes liegt bei + 8,0 Volt bis + 15,0 Volt. Die eigentliche Spannungsfestigkeit des
Schaltreglers liegt zwar bei ca. 40 Volt aber eine Transientenschutzdiode am Eingang des Reglers setzt bei nominal 16 Volt ein.
Der erzielte Eingangsspannungsbereich von 8 ... 15 Volt ist sowohl für externe Netzteile als auch für Bleiakkumulatoren
(auch bei einer Ladespannung bis 14.4 V) geeignet und toleriert den zu erwartenden Spannungsabfall auf Zuleitungen mit geringem Querschnitt.
CANNET Spannungsüberwachung
Die Eingangsspannung am Schaltregler ist über einen Spannungsteiler an einen Analogeingang des STM8 A/D Wandlers angeschaltet.
Dieser Spannungswert wird im “Basis”-Protokoll zyklisch an die anderen Nodes, speziell jedoch an die mit einem Host verbundene(n) MASTER-Node(s)
übertragen. Der Host kann so die Betriebsspannung aller Nodes kontinuierlich überwachen und gegebenenfalls eine Störung hinsichtlich
Über- bzw. Unterspannung melden.
CANNET Referenzspannung
Der 10 Bit A/D-Wandler des STM8S208 verwendet die Betriebsspannung des Microcontrollers (+5.0 V) als Referenzspannung für den
AD-Konverter. Über den schon erwähnten Mehrgangtrimmer kann die Betriebsspannung am Schaltregler initial mit guter Genauigkeit eingestellt werden.
Eine zusätzlich im System vorhandene Spannungsreferenz ist auf einen der A/D-Wandler Eingänge aufgeschaltet und der Wandler
misst daher die 2.5 Volt Referenz als halbe Betriebsspannung mit einem Wert von nominal 0x1FFh (± 3 Bit).
Dieser Wert wird im “Basis”-Protokoll für jede Node separat zyklisch übertragen und erlaubt dem über die
UART verbundenen Host den Wert zu überwachen bzw. die anderen A/D Messwerte eventuell auch zu korrigieren. Dieses Monitoring ist von jeder MASTER-Node
für alle angeschlossenen Nodes möglich.
CANNET Temperatursensor
Auf jedem Node-Board befindet sich darüber hinaus ein Tempertursensor mit nachgeschaltetem Operationsverstärker der sein
Signal ebenfalls an den A/D Wandler liefert. Der Sinn dieses Temperatursensors ist eine Überwachung hinsichtlich Übertemperatur in den
einzelnen Nodes im Fehlerfall.
Die aktuelle Systemtemperatur wird so zyklisch alle 10 Sekunden mit dem “Basis”-Protokoll an den Host übertragen.
Dieser kann gegebenenfalls bei der Überschreitung einer Maximaltemperatur einen Alarm auslösen oder die Spannungsversorgung
über den CANNET Bus unterbrechen.
CANNET I/O Erweiterungsstecker
Der schon erwähnte 20-polige I/O Stecker auf dem Node-Basisboard erlaubt das Kontaktieren der vier Eingänge bzw. der vier
Ausgänge einer Node.
Zusätzlich befinden sich auf dem Stecker die Betriebsspannung von + 5.0 V und Masse , sowie eine weitere Einspeisungsmöglichkeit
für eine externe Versorgungsspannung von + 12,0 V.
Für komplexere Systemerweiterungen
steht neben diesen Signalen auch die SPI-Schnittstelle des Microcontrollers an den Pins 1,2 und 3
verfügbar. Diese Schnittstelle wird in der Version 1.0 der Nodes nicht unterstützt stellt aber
beispielsweise eine Erweiterungsmöglichkeit für mehr
digitale Ausgänge zur Verfügung.
Mechanisch kann auf den I/O Stecker eine kleine Zusatzplatine aufgesteckt werden die diese zusätzlichen Funktionen unterstützt.
Im einfachsten Fall kann eine Zusatzplatine mit einer Klemmleiste für die externe Verdrahtung angebracht werden.
CANNET Optionsstecker
Für die Messung von Umweltparametern wie Umgebungstemperatur, Luftfeuchte und Luftdruck ist eine weitere Zusatzplatine angedacht die
auf den beiden 10-poligen Steckverbindern beiderseits des Microcontrollers plaziert wird. Über zwei zusätzliche Bohrungen die sich mittig der
Längsseite der Basis-Leiterplatte befinden, kann diese Zusatzboard auch mechanisch fixiert werden.
Über den “Modul”-Connector 1 stehen dabei bis zu 5 Analogeingänge
(bzw. bis zu 5 I/Os) zur Verfügung, während über den “Modul”-Connector 2
die “I2C”-Bus Signale des Microcontrollers plus zwei weitere I/Os des Controllers bereit stehen.
CANNET Signalisierung
Für die visuelle Überwachung im laufenden Betrieb sind auf dem Basis-Board drei LEDs verfügbar die folgende
Funktionen anzeigen:
Power
(grün)
direkte Anzeige der + 5,0 V Versorgungsspannung
CAN
(blau)
Aktivitätsanzeige auf dem CANNET Bus (TX/RX)
UART
(orange)
Aktivitätsanzeige auf der UART Verbindung (TX/RX)
Die digitalen Ausgänge
Die Funktionalität der digitalen Ausgänge läßt sich für jeden einzelnen Ausgang separat an der lokalen Node
konfigurieren. Es stehen dabei, wie nachfolgend beschrieben, drei verschiedene Modi zur Auswahl. Die Konfiguration wird im nicht flüchtigen Speicher
der Node abgelegt und ist deshalb auch nach einem Reset oder einem Neustart verfügbar.
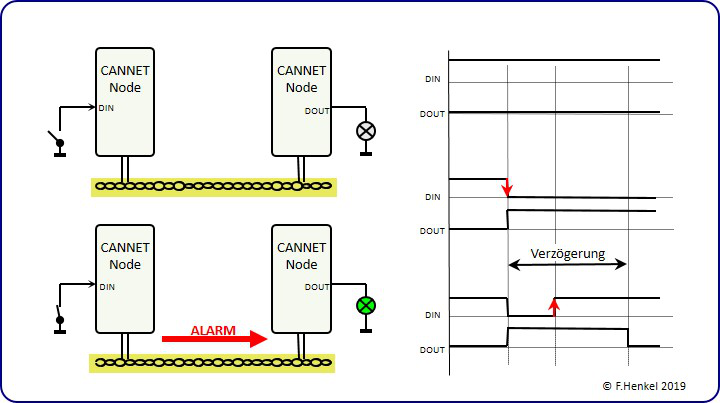
Der ALARM Modus
Im Alarm Modus wird nur das auf dem CANNET Bus von allen Nodes übertragene “Einschalt” Signal eines digitalen Eingangs
ausgewertet. Ein entsprechendes CANNET Protokoll wird auf Grund der aktiven Flanke (üblicher Weise die fallende Flanke) von der sendenden Node erzeugt
und über den CANNET-Bus übertragen.
Jede verbundene Node die einen oder mehrere der Ausgänge für dieses Signal konfiguriert hat wird dieses Signal entsprechend
auswerten und den oder die Ausgänge aktivieren.
Für den ALARM Modus wird in die Konfiguration jedes Ausgangs auch ein
Delay-Wert eingetragen (für einen Bereich von 0,1 bis 25,5 Sekunden) der nach Ablauf den entsprechenden
Ausgang wieder zurücksetzt.
Die primäre Anwendung des ALARM Modus ist die Weiterleitung eines Alarmsignales von einem Sensor oder Alarmkontakt an eine Alarmzentrale.
Durch die Delay Steuerung ist ein im ALARM Modus konfigurierter Ausgang aber auch als Zeitschalter (z.B. Treppenlicht Automat) verwendbar.
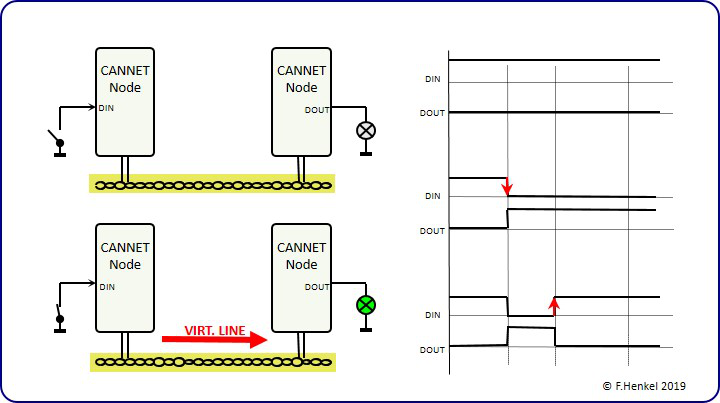
Der VIRTUAL LINE Modus
Ein im “Virtual Line” Modus konfigurierter Ausgang benutzt das “Einschalt”
Signal in derselben Art und Weise wie ein “ALARM”Ausgang. Mit dem Empfang des Signals wird der entsprechende Ausgang aktiv geschaltet.
Im Gegensatz zum “ALARM” Modus wird der Ausgang aber nicht nach einem programmierbaren Delay zurück gesetzt sondern die
Node wartet auf ein entsprechendes “Ausschalt” Protokoll vom gekoppelten Eingang. Erst mit dem Empfang des “Ausschalt” Signals wird
der oder werden die Ausgänge wieder in den “inaktiven” Zustand gesetzt.
Im Verhalten sieht diese Konfiguration wie eine “virtuelle” Leitung aus, da jede Änderung des entfernten Eingangs sich
direkt im lokalen Ausgang wiederspiegelt.
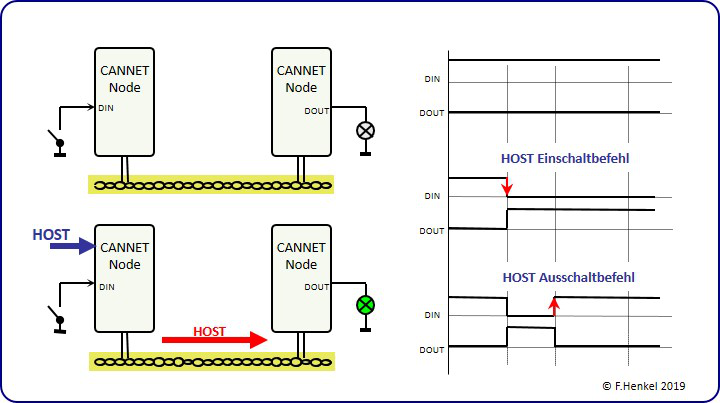
Der HOST Modus
bedient den Ausgang direkt über ein entsprechendes Host “Kommando”
das über die UART einer beliebigen MASTER Node in das System eingespeist werden kann. Das Kommando erlaubt die direkte Kontrolle des im HOST Modus
konfigurierten Ausgangs hinsichtlich “Aktivierung” bzw. “Deaktivierung”.
Im HOST Modus ist die Adressierung der remote Ausgänge durch die NODE-Nummer
und die CHAN-Nummer (Channel Nummer) möglich.
Durch die Firmware der Node besteht aber auch die Möglichkeit den Ausgang weiterhin über die Konfiguration des Ausgangs mit
einem remote Eingang zu koppeln. In diesem Fall kann ein gekoppelter Eingang den Ausgangskanal weiterhin einschalten. Da es aber keinen Sinn macht den
Ausgang im HOST Modus nach einer bestimmten Zeit wieder abzuschalten bleibt der Einschaltzustand erhalten und kann nur über einen Host-Befehl wieder
deaktiviert werden.
Sollte diese zusätzliche Möglichkeit nicht gewünscht sein, so kann als NODE-ID der Wert “0” in die
Ausgangskonfiguration eingetragen werden. Die NODE-ID “0” ist im CANNET System nicht erlaubt und daher wird keine Kopplung möglich sein.
Die digitalen Eingänge
Eine Konfiguration der digitalen Eingänge (DIN) ist in den CANNET Nodes nicht vorgesehen. Wie im Kapitel 2.2 beschrieben sind die
beiden Eingänge DIN1 und DIN2 über
Jumper hinsichtlich der “aktiven” Flanke einstellbar.
Diese Möglichkeit ist auf dem CANNET Basis-Board für die Eingänge DIN3
und DIN4 nicht gegeben.
Das RS232 Interface (UART)
Die auf der CANNET Node verfügbare RS232 Schnittstelle dient verschiedenen
Anwendungszwecken die nachfolgend beschrieben werden. Die Schnittstelle ist bidirektional und besitzt eine fest eingestellte BAUD-Rate von
115 kBAUD (mit 8 Datenbits, einem STOP-Bit, ohne Parity Unterstützung).
Im HOST Modus (DIP Switch 1 ist “ON”) werden alle relevanten CANNET
Meldungen aller angeschlossenen Nodes (mit Ausnahme der eigenen Node) über das Interface ausgegeben.
Im NODE Modus (Slave) werden dagegen alle “zyklisch” erzeugten Systemmmeldungen wie
beispielsweise das “BASIS Daten Protokoll” nicht über die UART ausgegeben, da für diese
Informationen kein Abnehmer (Host) vorhanden ist.
Unabhängig vom eingestellten Modus (HOST oder NODE) der einzelnen Teilnehmer ist eine Konfiguration der “
lokalen” Node (sprich der Node die direkt über die RS232 Schnittstelle verbunden ist) zu jeder
Zeit möglich.
Eine “remote” Konfiguration ist aus Sicherheitsgründen im
CANNET System nicht implementiert.
Die Konfiguration eines Ausgangs (Configure)
Über die UART Kommandos “CID” und “
COUT” kann die lokale Node , also die mit der
UART verbundene Node, konfiguriert werden. Diese Funktion steht sowohl für HOST-Nodes (Master) als auch für SLAVE-Nodes zur Verfügung.
CID Kommando
Das “Configure ID” Kommando ermöglicht die Konfiguration der
lokalen NODE-ID und eines NODE-Kurznamens, die
beide im nicht flüchtigen Speicher der Node angelegt werden. Die NODE-ID kann Werte zwischen 1 und 255 annehmen während der NODE-Kurzname aus
maximal 7 Zeichen bestehen darf.
Der NODE-Kurzname dient zur besseren Lokalisierung der im System verbauten Nodes.
Die mit dem CID Kommando übermittelten Parameter werden automatisch
im EEPROM gespeichert, weitere Aktionen sind dabei nicht notwendig.
COUT Kommando
Über das “Configure OUTput” Kommando kann ein
einzelner Ausgangskanal
der lokalen Node mit einem Eingang einer “remote” Node gekoppelt werden. Dazu wird die NODE-ID der sendenden NODE und die Kanalnummer
(CHAN) des digitalen Eingangs (DIN) der Node definiert.
Darüber hinaus ist auch der MODUS für diesen Ausgang (DOUT)
einstellbar und auch die Verzögerungszeit für die Deaktivierung des Ausgangs.
Für jeden Ausgang der lokalen NODE ist ein eigener COUT Befehl nötig. Die Konfigurationen werden im nichtflüchtigen
Speicher der lokalen Node abgelegt und müssen danach nicht mehr nachgeladen oder geändert werden solange die Konfiguration im Netzwerk
nicht einer Änderung bedarf.
Das Auslesen einer lokalen Node (Read)
Die mit den CID und COUT Kommandos festgelegten Daten können über die “RID
” und “ROUT” Befehle auch wieder aus der lokalen Node ausgelesen
werden. Die “Rxxx” Kommandos, also die READ
.... Funktionen sind immer auf die lokale Node bezogen.
Mit den Kommandos RID, ROUT
und RDIP können alle relevanten Systemdaten der lokalen Node ausgelesen werden und in einem
PC basierten Konfigurations Programm dargestellt bzw. verarbeitet werden.
RID Kommando
Das “Read ID” Kommando liest die NODE-ID der lokalen Node direkt aus.
Es werden sowohl die lokale NODE-ID als auch der NODE-Kurzname
ausgelesen und mit einer Nachricht über die UART an den HOST (PC) weitergeleitet.
ROUT Kommando
Im Gegensatz zum COUT Kommando das nur einen einzelnen Ausgangskanal konfiguriert, liefert das ROUT Kommando alle 4
Ausgangskonfigurationen als Nachricht in 4 getrennten Zeilen an den Host zurück. Damit kann der Host einen kompletten Konfigurationssatz
für die lokale Node für den Benutzer darstellen.
RDIP Kommando
Zusätzlich zu den RID und ROUT Kommandos ist ein “RDIP”
Kommando implementiert, das die aktuelle Stellung der beiden DIP-Schalter (Hardware) auf dem CANNET Base-Board liefert.
Als Nebeneffekt wird bei der Verwendung eines RDIP Kommandos die DIP-Schalterstellung neu eingelesen.
Das Auslesen einer remote Node (Get)
Wie bereits beschrieben, können aus Sicherheits-Gründen remote Nodes nicht von lokalen Nodes konfiguriert werden.
Es besteht aber die Möglichkeit die Konfiguration von remote Nodes zu jeder Zeit durch jede beliebige Node auszulesen.
Diese “Gxxxx” (GET
.....) Befehle sind relativ komplex da der UART-Befehl an die lokale Node erst in einen CANNET Request umgewandelt werden muß,
welcher nach der Übertragung zur Ziel-NODE dort eine CANNET Antwort initiert. Nach der Rückübertragung der CANNET Antwort zur
lokalen Node werden die Daten wieder in eine UART Nachricht umgesetzt und an den HOST ausgegeben.
GID Kommando
Mit Hilfe des “GID” Kommandos (GET ID) läßt sich
die NODE-ID und der NODE-Kurzname der
remote Node auslesen, der im Parameter des GID Kommando adressiert wurde.
GOUT Kommando
Das “GOUT” Kommando entspricht weitgehend dem für lokale
Nodes implementierten ROUT Kommando. Alle 4 Parameterblöcke der adressierten Node werden mit diesem Befehl zurückgemeldet.
Auch dieses Kommando muß zwingend die Zieladresse übermitteln um die angesprochene Node zu definieren von der
gelesen werden soll.
GDIP Kommando
Das “GDIP” Kommando entspricht ebenfalls dem für
lokale Nodes geltenden RDIP Kommando. Es enthält wie die anderen GET Kommandos die Zieldaresse als Parameter.
Das Steuern eines Ausgangs
Wie in der Beschreibung der Ausgangs-Modi beschrieben ist es im HOST Modus
möglich einen Ausgang gezielt über einen Befehl AUS bzw. EIN zu schalten. Für diese Funktion wurde folgender UART Befehl implementiert.
SOUT Kommando
Das “SOUT” Kommando (S
witch OUTput) adressiert einen Kanal (CHAN) in einer
definierten Node (NODE-ID) und schaltet diesen gezielt EIN bzw. AUS (
STAT Parameter).
Dieses Kommando ist nur wirksam wenn der angesprochene Kanal in der Ziel-Node im HOST Modus konfiguriert wurde.
Der virtuelle VCOM Kanal
Eine Erweiterung der Funktionalität des CANNET Systems bildet der “virtuelle VCOM Kanal
” der für eine einfache Datenübertragung gedacht ist. Dieser Datenkanal ist nur begrenzt leistungsfähig
hinsichtlich Datenvolumen und Geschwindigkeit und besitzt im CANNET System darüber hinaus eine geringe Priorität.
Das VCOM Kommando
Das “VCOM” Kommando bildet den Start einer solchen Datenübertragung,
die maximal 4 CANNET Frames zu jeweils 8 Byte, also
32 Byte lang sein kann. Neben der Ursprungs- und der Zieladresse wird eine laufende Nummerierung der übertragenen Frames
durchgeführt um ein sicheres Zusammensetzen der ursprünglichen
Nachricht vor der UART zu ermöglichen. Die Länge des
VCOM Protokolls wird durch die Verwendung einer Carriage Return/Line Feed
Kombination definiert, allerdings werden Zeichenketten die 32 Byte (ohne Cr/Lf)
überschreiten auf eben diese 32 Byte gekürzt. Ein Cr/Lf wird bei jedem Protokoll
mit ausgegeben.
Im Gegensatz zu einer COM-Schnittstelle die eine Punkt-zu-Punkt Verbindung darstellt ist in der virtuellen VCOM Schnittstelle ein
Routing implementiert. Eine Nachricht kann also ganz gezielt an einen einzelnen Empfänger übermittelt werden der darüber hinaus die
Information erhält von welchem Sender die Nachricht stammt um gegebenenfalls eine Rückantwort zu ermöglichen.
Als mögliche Anwendung für das VCOM Kommando ist beispielsweise ein Text-Display, ein Visualisierungs-Tableau oder
ein Bedienteil zu sehen. Durch de Flexibilität der Datenlänge können darüber hinaus eigene Protokolle implementiert werden
die im CANNET System aktuell nicht vorhanden sind.
Copyright Notiz
Copyright 2019 by Dipl.Ing.(FH) Franz Henkel
Dieses Dokument sowie dessen Inhalt, insbesondere Texte, Fotografien und Grafiken, unterliegt dem Copyright
(© 2019) und sind nur
mit einer schriftlicher Zustimmung des Autors, Dipl.Ing.(FH) Franz Henkel zur vollständigen oder auszugsweisen Weiterverwendung in Form einer
gedruckten oder elektronischen Kopie oder Replikation bzw. einer vollständigen oder auszugsweisen Bereitstellung des Inhalts in schriftlicher,
gedruckter oder elektronischer Form, zu verwenden.